
After the self-driving rc car build I wanted to repurpose the Jetson and make it more modular. Working with power constraints provides a creative design opportunity! I wanted to have the option to control the Jetson without connecting to it over SSH so I bought a five inch monitor and used that on my desk for a while.
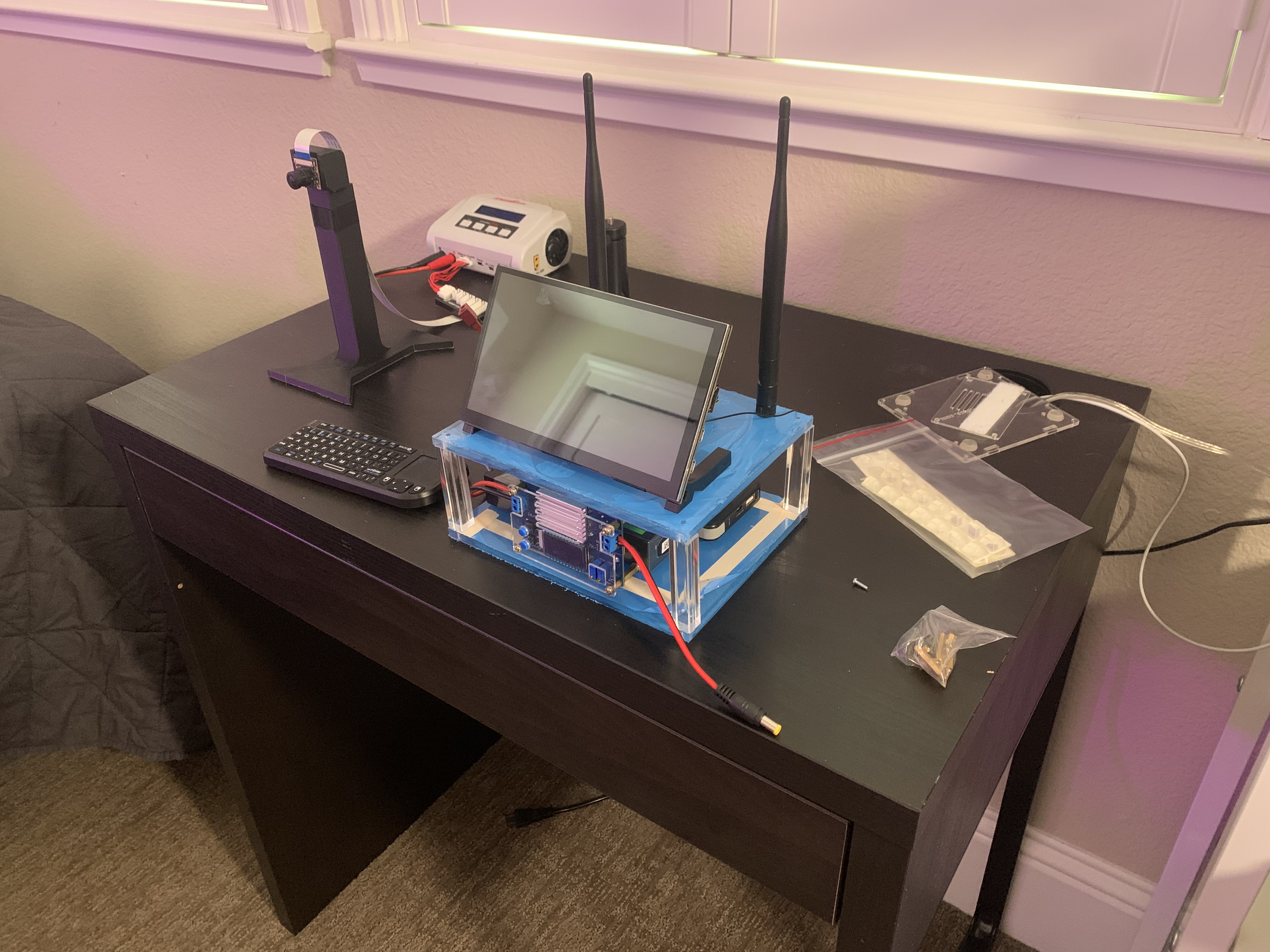
I originally had a full-sized bluetooth keyboard I was using but in order to keep things minimal I opted for a micro-keyboard that included a touch pad. The Jetson is a great tool for messing with small programs and it has been interesting seeing what other people have done with it on the Nvidia Developer Community. I have even seen people put it on home made quadcopters and add some of the sensor shields to it to expand it’s capabilities.
I added an environmental sensors module that actually attaches to the main board through the I2C bus. I thought it would be fun to try out weather monitoring in different locations inside and around my house. In order to power it, I used the same components from the self-driving rc car, mainly the DC-DC buck converter and two lipo batteries I already had. I also had some scrap acrylic cut to size and got to setting everything up.
The sensor board came with some documentation and where to locate some pre-written libaries that interacted with the sensors on the board. The Python was quite simple to modify and turning on different sensors was only a matter of importing different modules. I did have to dig in to the individual scripts to set configuration parameters such as G-force sensitivity and temperature conversions. I wrote a main script that allows for logging of data and exporting to a CSV file which could then be used later for exploratory data analysis (EDA).
I also added a Luxonis OAK-D-Lite stereoscopic camera which has its own internal processor for running computer vision models. This was fun to try out and see if it could identify people walking around the house.
I did see that Nvidia is coming out with a new generation of the Jetson nano in January 2023. I definitely plan to pick one up and possibly a PixHawk flight controller to start testing out more drone applications. I’m excited for the future!



{kind=link}